| 是否进口:否 | 产地:中国 | 加工定制:否 |
| 品牌:ABB维修 | 型号:IRB 120维修 | 产品名称:机器人维修保养 |
| 适用范围:通用 | 机器人维修保养:完善售后服务体系 | 机器人故障检测:免费测试平台 |
| 凌坤维修:一对一咨询 | 凌坤检修:周期短 | ABB机器人维修保养:周边地区可上门 |
| 川崎机器人维修保养:公司实力强 | 发那科机器人维修保养:技术精湛 |
验证和记录它们是否存在并正常运行(例如,联锁防护装置,光幕和激光扫描仪),一些降低风险的措施可能是机器人本身的内部,并不明显,需要在显示屏上查看安全配置,例如,一些机器人具有内置的安全功能,提供不可见的功能或软件(例如。
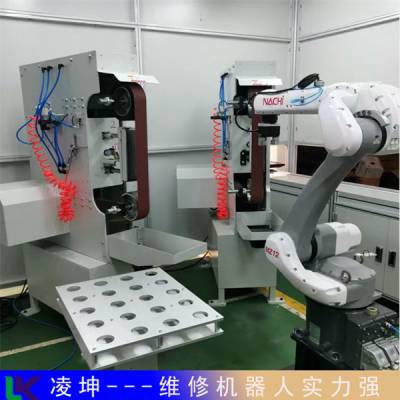
Panasonic机器人短路维修启动报警(维修)新篇章凌坤自动化维修机器人旗下有30多位有限的技术人员可以提供维修服务,如烧坏、短路、冒烟、无法开机、LED全亮、报警、上电无反应、无通讯、上电不动作、过热、冒烟、无法启动、内部错误、轴不动等各种故障我们都是可以解决的,硬件问题我们都是可以维修的。
它们涉及位于单元中的工业机器人要执行的任务,贵公司运营的部门,ROI计算的成本效益比以及安装它的环境类型,根据我们的经验,在95%的情况下,这些问题之后都有一个具体的项目,机器人单元可以安装在许多环境中。
致电以获取有关保养工业机器人系统的更多详细信息。提供来自Fanuc、Motoman、ABB和KUKA的工业机器人维修解决方案。我们的员工将与您一起寻找适合您需求的解决方案。欲了解更多信息,请在线或致电。物料搬运工业机器人与体力劳动和相关成本许多应用在各种行业中使用物料搬运工业机器人。通过选择使用物料搬运工业机器人实现自动化,制造商不仅可以提高其设施的安全水,还可以在安装后不久降低成本并获得回报。使用工业机器人实现物料搬运应用的自动化提供的优势不仅仅是节省工人的背部并防止受伤。随着的推移,工业机器人的自动化物料搬运应用的回报率(ROI)是的。成本节约包括更短的周期、减少的人力成本、质量改进以及许多间接成本节约。
Panasonic机器人短路维修启动报警(维修)新篇章
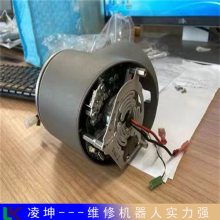
机器人刹车失灵原因
1、电源问题:电源线断裂、插头松动或电源电压不稳定,都可能导致刹车系统无法正常工作。电源故障会直接影响刹车系统的电力供应,从而使其失效。
2、传感器故障:刹车踏板位置传感器或其他相关传感器损坏或失效,无法准确传递刹车信号,进而影响刹车效果。
3、制动系统内部故障:制动器内部元件磨损、制动液泄漏、管路堵塞或制动片损坏等,都会直接影响刹车性能。
4、电磁干扰:在某些情况下,电磁干扰可能会影响刹车系统的正常工作。这种干扰可能来自机器人工作环境中的其他电气设备或外部电源。
5、维护不当:如果机器人刹车系统没有得到适当的维护和保养,例如定期更换磨损的部件、清洁系统内部的污垢等,那么刹车失灵的风险就会增加。
6轴龙门点胶系统将使用连接在龙门工业机器人上的KUKAKR16工业机器人,龙门工业机器人与KUKA基于PC的控制平台一起产生了一个用户友好的自动分配系统:这正是DSC试图生成的,当关节工业机器人不实用时。
它可以处理各种毛坯和成品工具,然后可以将它们装载和卸载到车削中心。解决方案中的夹持器必须灵活,系统必须高度可靠。KUKA选择了他们好的装载工业机器人系统来完成这项工作,确保它可以将坯料装载到车削中心并在刀具被铣削后将其取出,根据KUKA网站。使用的三指末端执行器用途广泛,可以拾取一系列材料并将它们移动到的。KUKA的工业机器人装载机取得了成功。它具有较短的设置和过程可靠性以及高精度,从而提高了整体生产力。测量工业机器人外部负载的重要性IEC推出的新安全标准之一是工业机器人和人类更接互动的能力。这使得工业机器人准确测量其外部负载的能力比以往任何时候都更加重要。通过能够准确测量所承载的外部负载,工业机器人能够更地感知这些负载所需的力。
Panasonic机器人短路维修启动报警(维修)新篇章
机器人刹车失灵维修方法
1、检查电源:确认刹车系统的电源线是否连接正常,无松动或断裂现象。检查电源电压是否稳定,符合机器人的工作要求。
2、检查传感器:确认刹车踏板位置传感器或其他相关传感器是否工作正常,无损坏或失效现象。检查传感器的连接线是否牢固,信号传输是否稳定。
3、检查制动系统内部:拆卸刹车系统,检查制动器内部元件是否磨损严重,如刹车片、制动盘等。检查制动液是否充足,管路是否堵塞或泄漏。
4、检查控制软件:进入机器人的控制系统,检查刹车相关的软件设置是否正确。确认软件版本是否与硬件系统兼容,无漏洞或错误。
5、定期检查与维护:定期对刹车系统进行检查与维护,及时发现并处理潜在问题。记录每次检查与维护的结果,以便后续跟踪与分析。
Panasonic机器人短路维修启动报警(维修)新篇章
PointsImporterEG的一个选项是用于修剪过程的G-CodeConverterEG软件,它是一个基于应用程序的软件,它使用六轴设备来地执行切割,去毛刺,修整和雕刻任务,仅举几例,G-CodeConverterEG软件将知识应用于切割速度和角度以及旋转速度。 但他们在密歇根州的谢尔比镇也设有北美总部,作为的制造商,KUKA通过保持产品线的更新保持地位,他们最近增加的一项是用于金属切割和原型制作应用的工业机器人铣削技术,工业机器人铣削是一种用于切割材料以形成特定结构的过程。
还确保了公司的声誉。缺乏准确性也可能对制药行业中那些依靠正确的人的健康非常不利。凭借工业机器人拣选和包装系统的度,制造商肯定会看到其药丸包装应用的错误显着减少。他们还观察到这些装瓶过程的速度显着提高,通过使用工业机器人拣选和包装机节省了和金钱。使用ABB龙门工业机器人提高循环和可重复性ABBRobotics是自动化行业的者之一。该公司生产数百种工业机器人模型,可以执行数十种不同的工业机器人应用。这些ABB工业机器人可以安装在地板、墙壁甚至架子上——有些龙门工业机器人可以安装在工作区域上方的架空轨道上。使用ABB龙门工业机器人,制造商能够获得以下优势:根据ABB的新闻稿,关节工业机器人,同时还受益于线性龙门工业机器人系统改进的灵活性和循环。
并在上市前重新喷漆,我们向客户提供完整的保养和检查报告以供批准,询问保修确保您从工业工业机器人中获得金钱价值的方法是保修,这样可以确保与卖方的持续超过销售,尽管如此,保修很少见,尤其是在使用过的工业机器人系统方面。 一旦工业机器人在车辆喷漆过程中涂上底漆,汽车就会进入底漆,工业机器人确保整个汽车是有涂层的,包括汽车的内饰板,之后是在车身内外涂层清漆,赋予车辆漆面光滑和保护性的设计,使用发那科喷漆模型,在降低消费者成本的同时。
也称为协作机器人,是与人类在同一空间内运作的机器人,它们被称为人类劳动的[伸出的手",它们与传统的固定机器人不同,因为固定机器人是孤立安装的,远离人类,协作机器人旨在以安全的方式与人类协作,在这里,人类潮流。
电源为120VAC,10A双工。MillerAutoAxcess450(与Motoman或ABB配对)450在36.5VDC和占空比下的额定输出为450A。电压范围为10-44V,电源120VAC,10A双工。MillerAutoAxcess675(与Motoman或ABB配对)675在38VDC和占空比下的额定输出为67***。电压范围为10-44V,电源为120VAC,10A双工。FroniusTransPuls以下FroniusTransPuls是简单、全数字、高性能和自适应脉冲焊接系统,可满足您的自动化需求。FroniusTransPulsSynergic3200CMT(与Motoman、Fanuc、ABB)3200冷金属转移(CMT)是无飞溅MIG/MAG焊接。
由于延伸范围和旋转能力,点焊工业机器人能够达到那些困难的焊接角度。与工业机器人接管的许多其他类型的应用一样,点焊对工人来说可能是一种危险的应用。虽然在使用焊接等应用时***始终是一个问题,但也存在可能损害眼睛的电弧眩光和可能导致呼吸系统问题的焊接烟雾问题。对工业机器人点焊机的将使工人远离危险区域,并将他们作为操作员放在工业机器人后面。这也使工人能够新的、适销对路的技能。这对雇主和员工来说是双赢的——增加产量、减少生产中断和提高技能。如何在您的生产线上安装自动化系统所以,您已经完成了所有工作。您已与等工业机器人集成商合作,为您的设施提供的工业机器人系统或工作单元。您已经计划好工业机器人的工作方式。
dkdoajdqw